|

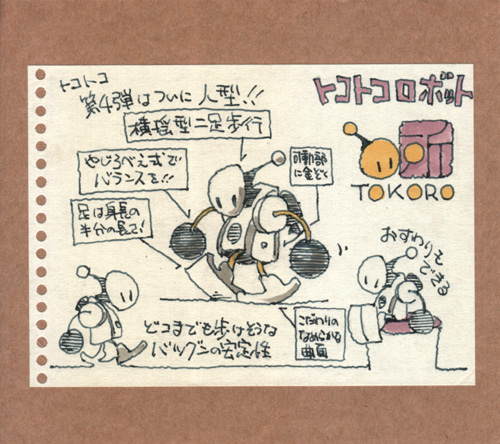 トコトコシリーズ第4弾は人型に挑戦!! トコトコシリーズ第4弾は人型に挑戦!!横揺式二足歩行のおもちゃをひっくり返して中を覗くと身長に対して意外と長い足を持っている これは重心を可動軸より少し下げる必要があるためです しかし今回は人型なので足の長さは身長の半分にしたい! 腕も付けたい! そこで腕は「やじろべえ式」に やじろべえ式にして先におもりをつけ重心を下げ安定性が増すはず またおもりの位置を可動軸より下げれば頭も支えてくれるはずです 身長は50ミリとテーブルサイズでかわいい感じに (足の長さは25ミリになります) 材料は基本は木材で可動部のみ真鍮 可動部には金属を!! 前回、木材で制作したモノは湿度で動きが変わってしまった モノが小さくて軽いのでこういった影響を受けやすいのです 影響を少しでもなくすため今回は真鍮を使います 以上をデザインに落し込みます といいつつ実は構想はウサギと同時期 デザインスケッチはすでに一年以上前に描いたモノを使用 名前は 所沢市出身トコトコロボット→「所・TOKORO」 相変わらず安易ではありますが愛情はありますのでお許しを ライバルはア○モもしくは○ボルタ まぁ夢は大きくってことで・・ そして製作開始 どうなるトコトコロボット「所・TOKORO」 ちゃんと歩いてくれるのでしょうか!! |
|
|
|
|
| 前作へ | 表紙へ | その2 制作編へ | トコトコ木馬へ |
ご覧になる作品は、すべて作家が著作権を有しているため、許可なく転載、改変その他類似の行為を禁じます。
All rights reserved. Copyright FUWARI